MISSION UPDATE — November 12, 2009
On this page:
PROGRAM STATUS
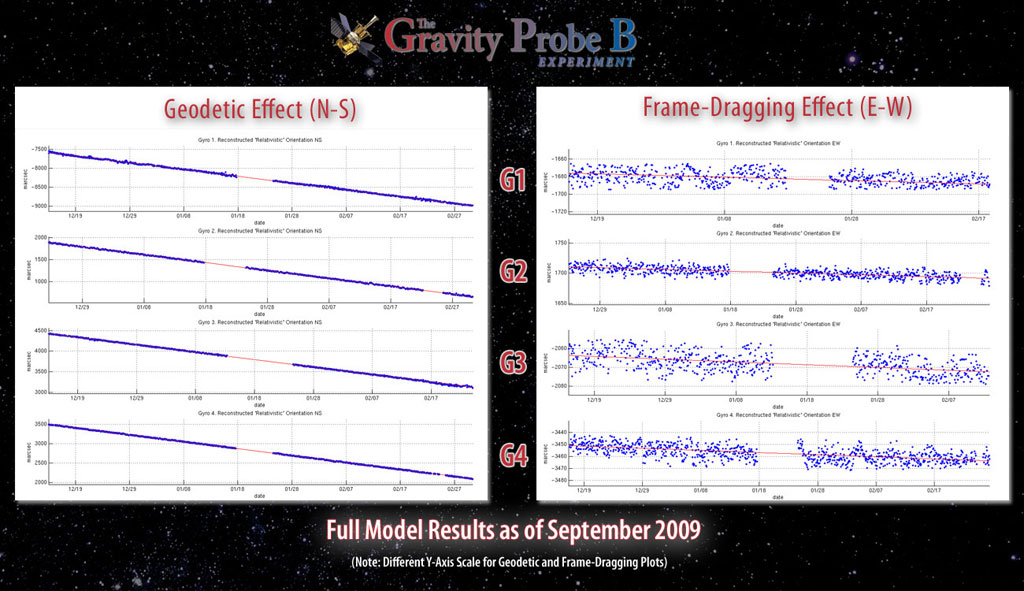
Both the geodetic and frame-dragging
effects clearly visible for all 4 gyros.
(Click to enlarge image.)
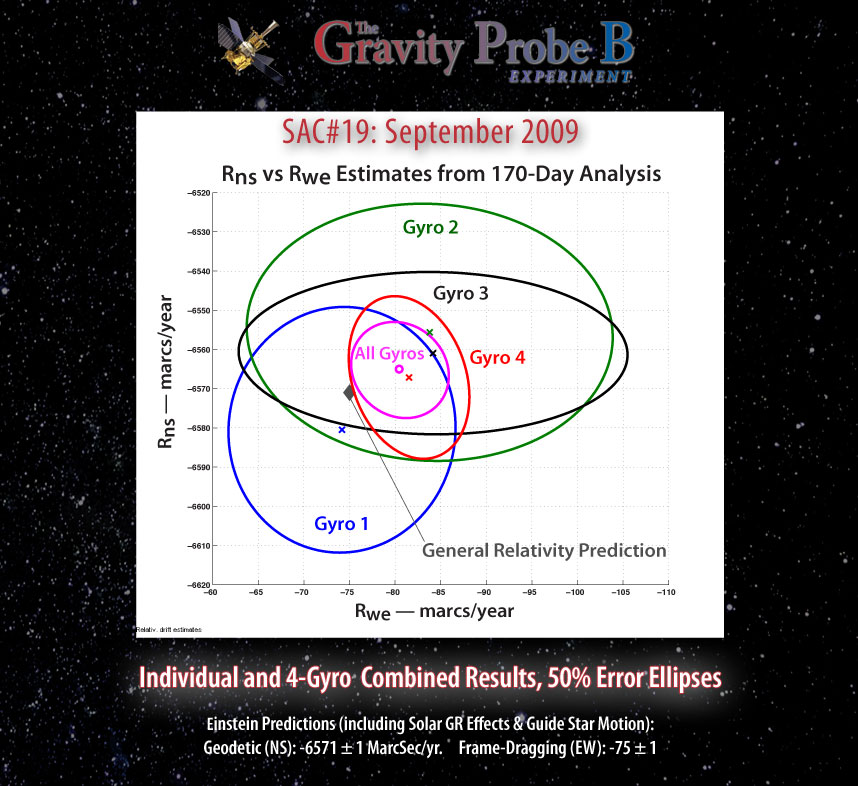
Individual and 4-gyro combined
estimates. (Click to enlarge image.)
Closing in on Einstein: Frame-Dragging Clearly Visible
The accuracy of the GP-B experimental results has improved seventeen-fold since our preliminary results announcement at the American Physical Society annual meeting in April 2007. At that time, only the larger, geodetic effect was clearly visible in the data. Over the past two and one half years, we have made extraordinary progress in understanding, modeling and removing three Newtonian sources of error—all due to patch potentials on the gyroscope rotor and housing surfaces. The latest results, based upon treatment of 1) damped polhode motion, 2) misalignment torques and 3) roll-polhode resonance torques, now clearly show both frame-dragging and geodetic precession in all four gyroscopes (see figure at top right).
The figure at lower right displays the science estimates as of September 2009, with the gyroscopes analyzed individually and combined. The estimates are indicated with colored "X"s, and the statistical uncertainty associated with each estimate is plotted with a corresponding colored ellipse.
The combined four-gyro result in the figure gives a statistical uncertainty of 14% (~5 marcsec/yr) for the frame-dragging (EW). The gyroscope-to-gyroscope variation gives a measure of the current systematic uncertainty. The standard deviation of this variation for all four gyroscopes is 10% (~4 marcsec/yr) of the frame-dragging effect, suggesting that the systematic uncertainty is similar in size (or smaller) than the statistical uncertainty.
Parallel Processing Enables Transition to 2-Second Filter Analysis
The results shown in the two figures at right above are based on a physical model of the gyroscope developed over the past four years. This model explains the changing polhode path affecting determination of the gyro scale factor, as well as patch-potential interactions between the gyro rotor and housing that induce Newtonian torques. Due to limitations in computer speed and processing power, the analysis was performed using once per orbit averaging of gyroscope orientation data (97-minute intervals), collected from the SQUID readouts and stored at 2-second intervals.
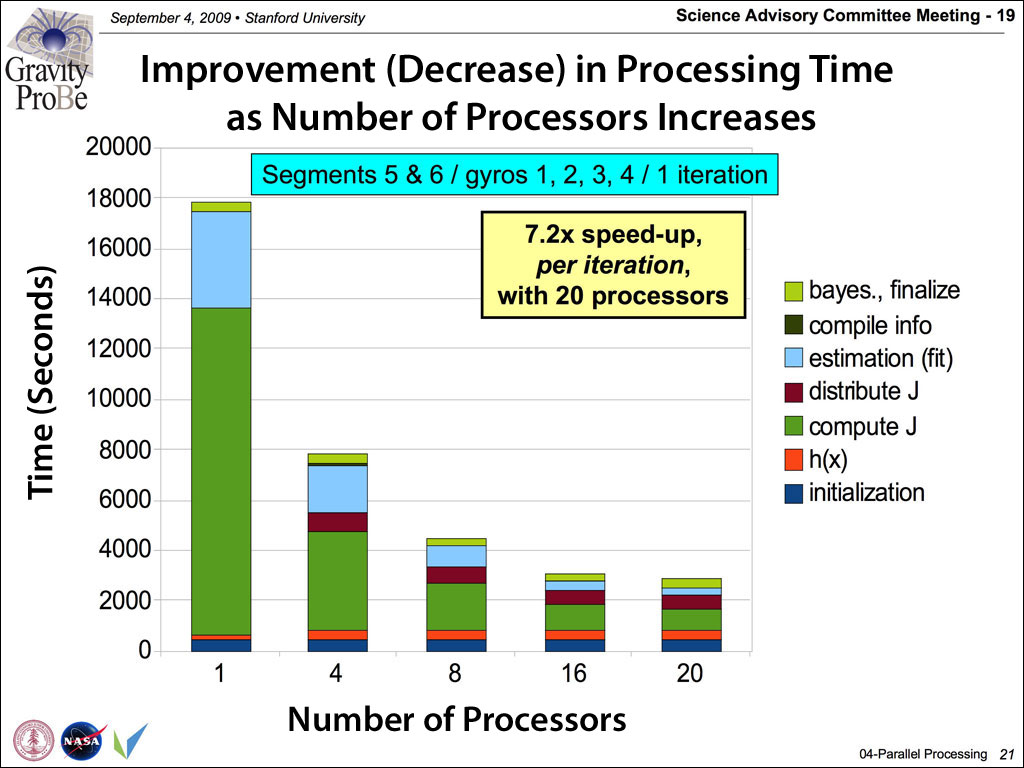
Parallel processing enables timely
analysis of GP-B's 2-second data
intervals. (Click to enlarge the image.)
The patch potential torques act at frequencies related to the spacecraft roll period (77.5 seconds). Significant improvements in the accuracy and precision of the final results will be achieved by performing the data analysis using the physical model of gyro behavior described above with the full complement of 2-second data—the highest resolution of the gyro orientation data. This 3,000-fold increase in data points requires transitioning from stand-alone computers to multiple processors working in parallel.
With Professor Charbel Farhat as CoPI, a 44-processor cluster is now in use for this effort. Transitioning the data analysis to a high-speed computer cluster posed the latest GP-B challenge. A subset of the GP-B team, comprised of both Stanford and KACST researchers, have been developing this new capability. During the past several months, we have succeeded in reducing computation time by a factor of seven, shortening a typical data analysis run from three days to overnight. (See figure at right.)
GP-B Science Advisory Committee (SAC) Meeting #19

SAC Meeting #19, September 4, 2009.
(Click to view photo.)
The 19th GP-B Science Advisory Committee meeting was held at Stanford on September 4, 2009. Members of the GP-B team detailed the latest progress in data analysis methodology and experimental results to the SAC members during the all-day session. Excerpting from the formal SAC#19 Meeting Report:
“…Preliminary results [using the current analysis tools] have been very promising, again giving good agreement for the relativity drifts among all four rotors. The project now appears to be converging on a result for the frame dragging, with a realistic expectation of an error (statistical plus systematic) at the several milliarcsecond per year level."
The Presentations page in the Resources tab of this web site contains Adobe Flash versions—with synchronized audio—of the first two presentations made at the SAC#19 meeting:
-
Introduction and Status Overview by Francis Everitt (12 min)
- Data Analysis Overview by John Conklin (50 min)
John Conklin received his Ph.D. from the Stanford Aero-Astro Department in December 2008. His doctoral dissertation is the 85th Stanford Ph.D. thesis related to GP-B. Moreover, it won the Ballhaus Award for the best Aero-Astro dissertation of 2008-09. Conklin’s work on trapped flux mapping has become a cornerstone of the data analysis effort.
These presentations provide a comprehensive overview of the GP-B data analysis effort to date and a clear roadmap of remaining work.
Three-Unit Course: Aero-Astro 255—Space Systems Engineering & Design, John Mester

GP-B research scientist, John Mester,
teaching a session of his Aero-Astro
255 course. (Click to enlarge.)
John Mester, a senior GP-B research physicist, at the request of Charbel Farhat, chair of the Stanford Aero-Astro Department (and GP-B Data Analysis Co-PI), is giving a comprehensive 3-unit course this quarter on space systems engineering and design, using GP-B as a case study. Following is the course description from the department's Fall 2009 course catalog:
This course will survey systemized approaches to design, fabrication, integration, and testing of flight hardware from the component level through functional systems. The development of systems level requirements based on flow-down from mission requirements and goals will be reviewed. Systems engineering techniques related to requirements development, requirements tacking and validation and verification will be compared. The course will include an examination of risk tracking and mitigation and the cost, benefit and limits of “Test it like you fly it” philosophy. The development of the Gravity Probe B Relativity Mission will be used as a case study to illustrate key principles.
The course has attracted strong attention and great enthusiasm among the students.
Stanford Precision Attitude and Translation Control Program (PAT)
Space provides unique opportunities to advance our knowledge of fundamental physics and astrophysics, enabling new ultra-precise experiments, impossible to perform on the ground. Future space missions to carry out such experiments will require spacecraft attitude and translation control of unprecedented precision. The Stanford Precision Attitude and Translation (PAT) Control Program leverages Stanford's unique experience in having successfully flown the world's only three-axis drag free satellites, Discos/Triad and GP-B.

The Integrated Test Facility payload &
spacecraft simulator at Stanford. (
Click to enlarge.)
Missions requiring Drag Free Control, such as LISA Pathfinder, LISA, STEP, and BBO, rely—as did GP-B—on inertial sensors whose true performance can only be realized after launch. Two central needs are: 1 )high fidelity simulations and 2) command procedures for in-space optimization of satellite control. As evidenced by the GP-B experiment, control of vehicle dynamics requires a complex, closed-loop interaction with payload systems and must take into account issues such as fluid slosh.
The PAT Control Program focuses on high accuracy attitude control, drag free control, and payload-spacecraft interaction dynamics. On-going efforts include the implementation of advanced spacecraft environment and dynamics models, development of spacecraft and payload sensor and actuator models, error modeling, parameter identification, state estimation, control algorithm design, and command template formation to establish realistic expectations and plan post-launch tuning and optimization.
The GP-B ATC experience has attracted wide interest. The Zentrum Angewandte Raumfahrt-technologie und Mikrogravitation (ZARM), University of Bremen, Germany is developing a generic drag-free simulator to assist future science missions including GAIA and STEP. Two ZARM team members are spending a year at Stanford. Their work, in the Aero Astro Department, involves refinement of simulator core dynamics to include the GP-B spacecraft dynamics and to validate the models by comparing the simulator results with actual flight data. Ivanka Pelivan and Matthias Matt from ZARM have made a detailed simulation of the expected external disturbances on the STEP spacecraft. In addition, Valerio Ferrone, from Rome, has completed an analytic model of test mass electrostatic interactions.
The PAT Program is now poised to focus on specific use and implementation of
- Fully integrated sensor-controller-actuator simulations, operating across the payload/spacecraft interface
- Existing modular architecture to enable efficient exchange of software models for hardware units (either in the form of prototype or final flight electronics systems) for hardware-in-the-loop verification
- High fidelity spacecraft bus and flight CPU to enable flight software verification with the science payload.
- Integrated Mission Operations consoles for command generation and verification and operations training.
Collaborative Research and Program Funding

GP-B Team, KACST Collaborators and
Friends of GP-B—May 30, 2009.
(Click to view photo.)
Current funding for GP-B is being provided as part of a collaboration between Stanford and the King Abdulaziz Center for Science & Technology (KACST) in Saudi Arabia. Beginning in August 2008, four KACST researchers have joined the GP-B data analysis team at Stanford. In addition, this collaboration has contributed to the establishment of the Stanford-KACST Center of Excellence through the Stanford Aero-Astro Department in November 2009. At right is a photo of the extended GP-B team, KACST collaborators and friends of GP-B, May 30, 2009.

Click to view/download PDF copy
of Fairbank Workshop flier.
William Fairbank Workshop on Fundamental Physics & Innovative Engineering in Space
In the Fall of 2010, we will hold the first William Fairbank Workshop on Fundamental Physics & Innovative Engineering in Space. This workshop, honoring GP-B co-founder William Fairbank, will bring together experimental physicists, aerospace engineers, industrial leaders, university and governmental managers to review past efforts and discuss future directions of space-borne physics experiments. The many technologies required to carry out GP-B will be presented in detail, and lessons learned from GP-B and other completed programs will provide foundations for new missions.
This workshop will be another step forward in fulfilling the technology dissemination mandate from the 1995 Space Studies Board NRC Task Group on GP-B, whose concluding observation strongly urged "...that the technology developed during NASA's support of GP-B be reported in the open literature for the benefit of the entire scientific community."
Finally, this workshop will be the capstone of the GP-B program, providing a venue for the formal release of the final GP-B science results, including a press conference announcing the results of this landmark experiment to the general public. Click on the thumbnail graphic at right to view a preliminary flyer about this workshop.
LINKS TO OTHER GP-B TOPICS
- GP-B Frequently Asked Questions (FAQ)
- Track the satellite in the sky
- Build a paper model of the GP-B Spacecraft
- Our mailing list—receive GP-B status updates via email
- View a Flash
video of Professor Everitt's 18 May 2006 lecture on GP-B
Note: Both audio-only and video versions of this lecture are also available on the Stanford on iTUNES U Web site. This Web page automatically launches the Apple iTunes program on both Macintosh and Windows computers, with a special Stanford on iTunes U "music store," containing free downloads of Stanford lectures, performances, and events. Francis Everitt's "Testing Einstein in Space" lecture is located in the Science & Technology—Engineering section. People with audio-only iPods can download the version under the Audio tab; people with 5th generation (video) iPods can download the version under the Video tab.
Previous Update | Index of Updates