The Extraordinary Technologies of GP-B
On this page:

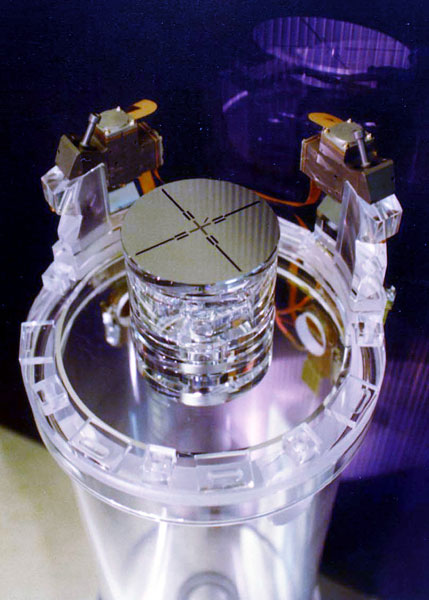
Einstein's image inverted
in an uncoated gyro rotor
To test Einstein's theory of general relativity, Gravity Probe B must measure two minuscule angles with spinning gyroscopes, floating in space. While the concept of Gravity Probe B is relatively simple, carrying out the experiment required some of the most accurate and sophisticated technology ever developed. In fact, scientists and engineers from Stanford, Lockheed Martin, and NASA had to invent over a dozen totally new technologies in order to meet GP-B’s near-zero constraints, because much of the technology required simply did not exist when the experiment was first suggested in late 1959 - early 1960. Einstein, himself once a patent clerk, would have enjoyed reviewing these extraordinary technologies. This section describes the technologies of the four systems that comprise the heart of the GP-B experiment.
World's Most Perfect Gyroscopes

Gyro rotors—uncoated fused quartz
(left) and coated with niobium (right)
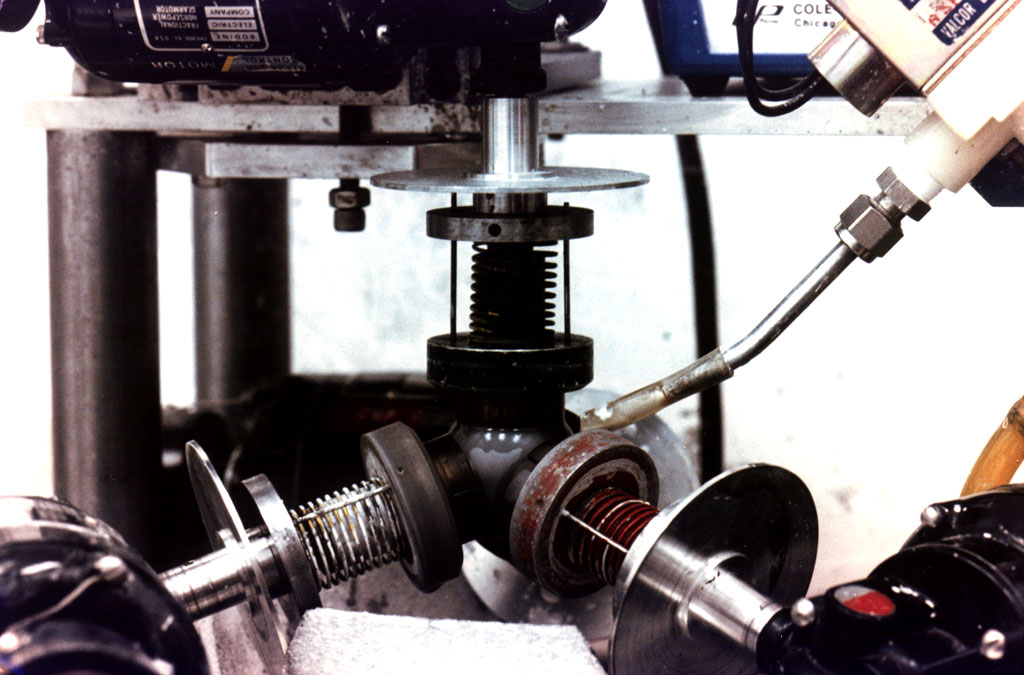
Rotor lapping & polishing machine

Polishing a GP-B gyro rotor and
measuring its roundness
Measuring the roundness of a gyro rotor

Gyro rotor and housing
To measure the minuscule angles predicted by Einstein’s theory, the GP-B team needed to build a near-perfect gyroscope—one whose spin axis would not drift away from its starting point by more than one hundred-billionth of a degree each hour that it was spinning. By comparison, the spin-axis drift in the most sophisticated Earth-based gyroscopes, found in high-tech aircraft and nuclear submarines, is seven orders of magnitude (more than ten million times) greater than GP-B could allow.
Gyro Rotors
Three physical characteristics of any gyroscope can cause its spin axis to drift, independently of the general relativity precession predicted by Einstein’s theory:
- An imbalance in mass or density distribution inside the gyroscope
- An uneven, asymmetrical surface on the outside of the gyroscope
- Friction between the bearings and axle of the gyroscope.
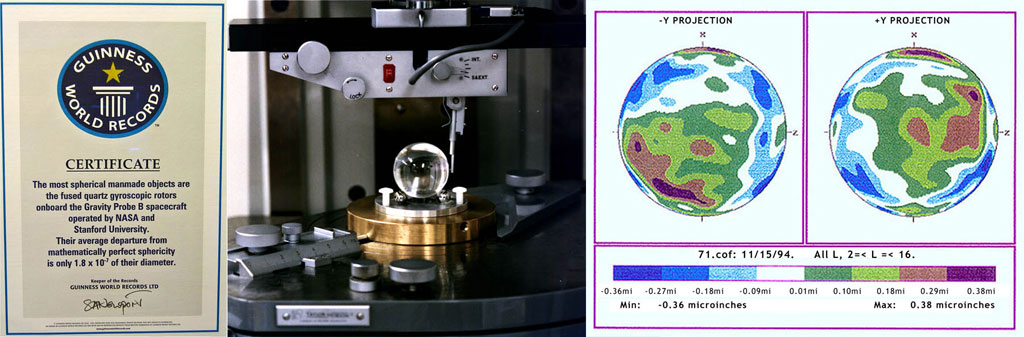
This meant that a GP-B gyroscope rotor had to be perfectly balanced and homogenous inside, had to be free from any bearings or supports, and had to operate in a vacuum of only a few molecules. After years of work and the invention of new technologies and processes for polishing, measuring sphericity, and coating, the result was a homogenous 1.5-inch sphere of pure fused quartz, polished to within a few atomic layers of perfectly smooth. In fact, the GP-B gyro rotors are now listed in the Guinness Database of World Records as being the roundest objects ever manufactured, topped in sphericity only by neutron stars.
The spherical rotors are the heart of each GP-B gyroscope. They were carved out of pure quartz blocks, grown in Brazil and then fused (baked) and refined in a laboratory in Germany. The interior composition of each gyro rotor is homogeneous to within two parts in a million. On its surface, each gyroscope rotor is less than three ten-millionths of an inch from perfect sphericity. This means that every point on the surface of the rotor is the exact same distance from the center of the rotor to within 3x10-7 inches.
Here are two ways to imagine how smooth this is. First, compare the GP-B gyro rotor’s smoothness with another smooth object—a compact disk. CDs and DVDs both appear and feel incredibly smooth. The pits on the compact disk's surface, which carry the digital information, are less than 4/100,000ths of an inch deep (one millionth of a meter). However, compared to the GP-B gyroscope, the surface of a CD is like sandpaper. The bumps and valleys on the surface of the GP-B gyroscope are 100 times smaller than those on a CD. Viewed at the same magnification, one could barely see any imperfections on the gyroscope's surface.
Alternatively, imagine a GP-B gyroscope enlarged to the size of the Earth. On Earth, the tallest mountains, like Mount Everest, are tens of thousands of feet high. Likewise, the deepest ocean trenches are tens of thousands of feet deep. By contrast, if a GP-B gyroscope were enlarged to the size of the Earth, its tallest mountain or deepest ocean trench would be only eight feet!
Finally, a GP-B gyroscope is freed from any mechanical bearings or supports by levitating the spherical rotor within a precisely machined fused-quartz housing cavity. Six electrodes, evenly spaced around the interior of the housing (three in each half), keep the rotor levitated in the housing cavity. During the IOC phase of the mission, a stream of pure helium gas was used to spin up each of the four gyroscopes to approximately 4,000 rpm. After that, all but a few molecules of the helium spin-up gas were evacuated from the housings, and the gyroscopes were left spinning—a mere 32 microns (0.001 inches) from their housing walls, free from any mechanical or fluid supports. During the experiment, the near-perfectly spherical and homogeneous rotors, combined with the highly sophisticated Gyro Suspension System, resulted in an average spin-down time constant of approximately 15,000 years for the four GP-B gyros.
The Gyro Suspension System (GSS)
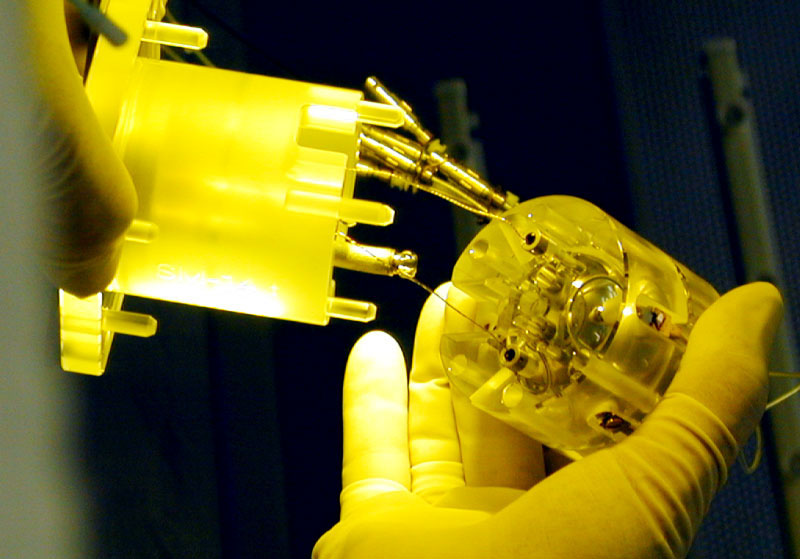
Assembling a GP-B gyroscope
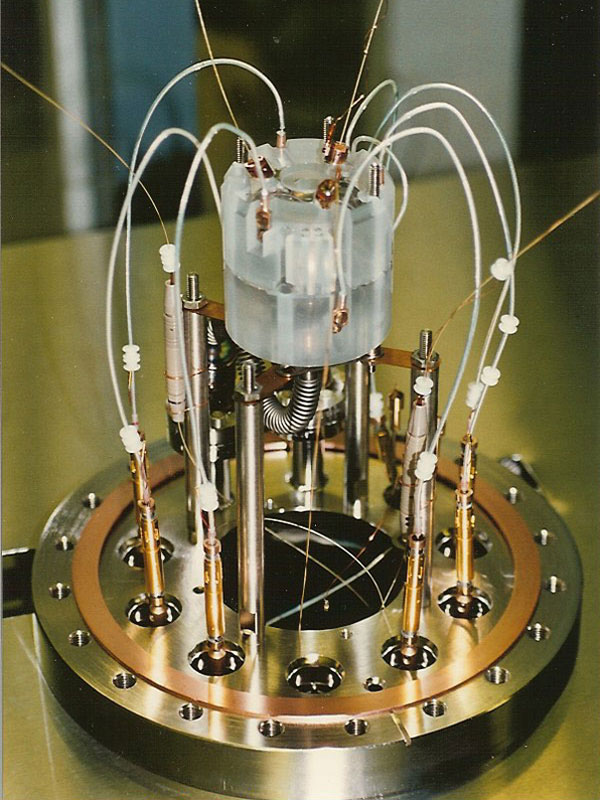
Testing a single
gyroscope
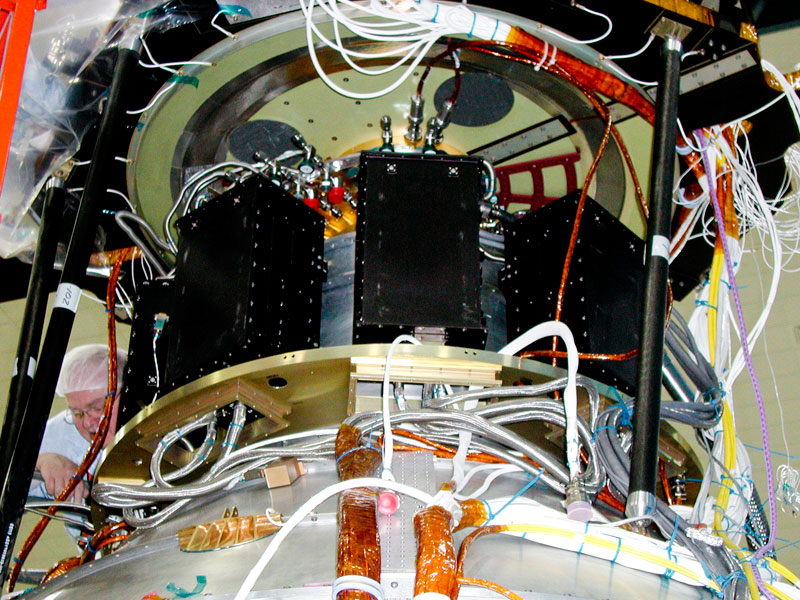
Four GSS control modules mounted
on the spacecraft frame
The GSS is a marvel of engineering in its own right. To perform its mission successfully, the GSS had to satisfy a number of requirements:
- Operate over 8 orders of force magnitude. The same system must be able to suspend the gyroscopes on Earth in a 1 g field as well as generate minimal disturbances at the 10-8 g level during data collection. (Note: it takes nearly 1,000 volts to levitate a GP-B gyro rotor here on Earth, whereas in space, it takes less than 100 millivolts—four orders of magnitude less force. This is one of the important reasons why the GP-B experiment had to be carried out in space, rather than in a laboratory on Earth.)
- Suspend or levitate the gyroscopes reliably. The system must never let a spinning rotor touch the housing. There is sufficient mechanical energy in a rotor spinning at 4,000 rpm to effectively destroy the rotor and housing in such an event.
- Operate compatibly with the SQUID readout system. The SQUID magnetometers are extremely sensitive. Thus, the suspension system must not interfere with these sensors, both during ground and on orbit operation.
- Minimize electrostatic torques during science data collection. The suspension system must meet centering requirements with absolutely minimal control effort, and thereby with minimal residual torques on the rotors.
- Apply controlled torques to the rotor for calibration and initial rotor spin-axis alignment.
- Act as an accelerometer as part of the “drag-free” translation control system to further minimize classical torques on the rotors by another factor of 106.
The GSS was initially designed over the course of two decades of research and development, beginning in the mid 1970s. The initial design was based on a laboratory system that used analog, rather than digital electronics. However, this analog system had a number of issues, including weight, power consumption, adherence to GP-B torque requirements and compatibility with the GPB SQUID readout electronics, that needed to be addressed in order to use this system in a spacecraft. By 1996, with the GP-B launch date then anticipated to be four-six years away, GP-B senior program management made the difficult decision to literally start over from scratch—that is, they decided to design and construct a digital, rather than analog suspension system. A new collaborative GSS team, including engineers and scientists from Stanford and Lockheed Martin was assembled at Stanford, and in record time, the new GSS team designed and built a digital GSS system that met all of the requirements listed above and performed flawlessly throughout the entire GP-B flight mission. Furthermore, the four suspension systems (one for each gyro) have continued to operate perfectly following the depletion of helium from the dewar, since they do not require cryogenic electronics to function.
Gyro Readout System
For GP-B to “see” the shape and motion of local spacetime accurately, we must be able to monitor the spin axis orientation of the gyroscopes to within 0.5 milliarcseconds, and locate the poles of the gyroscope to within one-billionth of an inch. How can one monitor the spin axis orientation of this near-perfect gyroscope without a physical marker showing where the spin axis is on the gyroscope? The answer lies in a property exhibited by some metals, called “superconductivity.”
Superconductivity & The London Moment
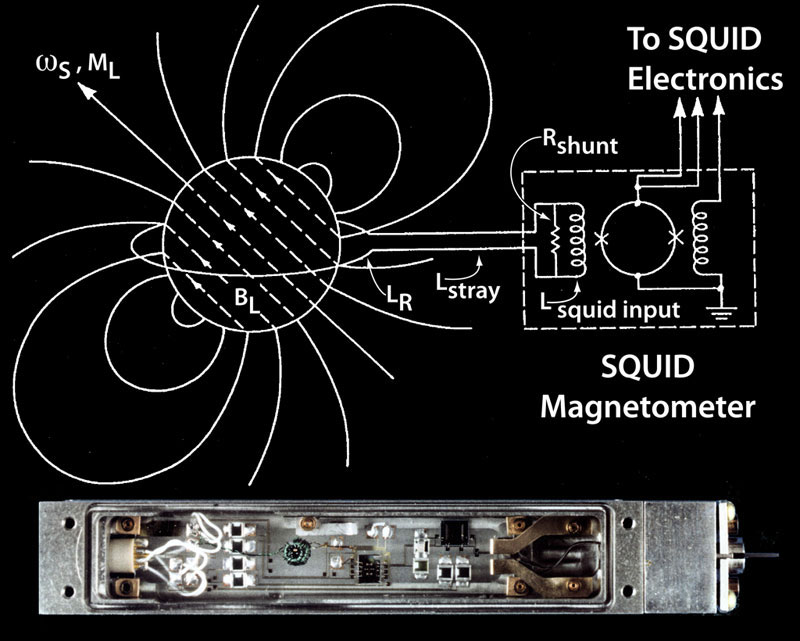
Schematic circuit diagram and photo
of a SQUID magentometer

Animation showing how the GP-B
SQUID readout works
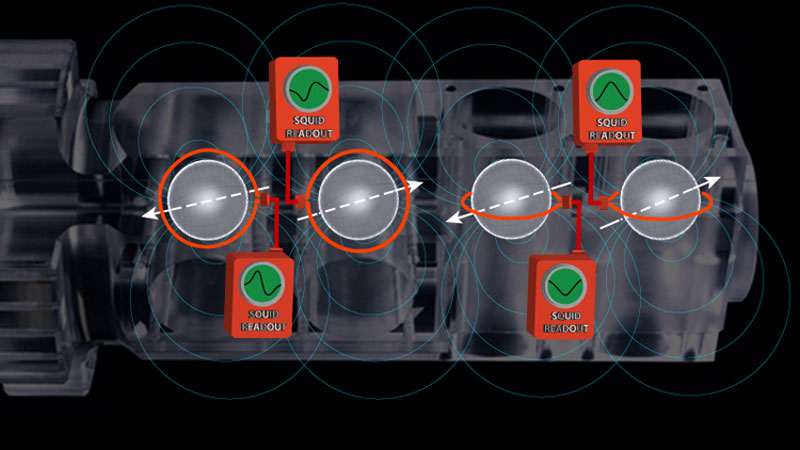
Drawing of 4 gyros & SQUIDs inside
the Quartz Block section of the
Science Instrument Assembly
Superconductivity was discovered in 1911 by the Dutch physicist H. Kammerlingh Onnes. He found that at temperatures a few degrees above absolute zero, many metals completely lose their electrical resistance. An electric current started in a superconductor ring would flow forever, if the ring were permanently kept cold. But, superconductors also have other interesting properties. In 1948, the theoretical physicist Fritz London predicted that a spinning superconductor would develop a magnetic moment—created by the electrons lagging the lattice of the superconducting metal—which is therefore exactly aligned with its instantaneous spin axis. In 1963, three different groups, including a GP-B graduate student, demonstrated the existence of this London moment experimentally.
What is remarkable about this phenomenon (and most fortunate for Gravity Probe B) is that the axis of this magnetic field lines up exactly with the physical axis of the spinning metal. Here was the “marker” Gravity Probe B needed. We coated each quartz gyroscope with a sliver-thin layer of a superconducting metal, called niobium (1,270 nanometers thick). When each niobium-coated gyroscope rotor is spinning, a small magnetic field surrounds it. By monitoring the axis of the magnetic field, Gravity Probe B knows precisely which direction the gyroscope's spin axis is pointing, relative to its housing.
Pickup Loops & SQUID Magnetometers
The magnetic field axis is monitored with a special device called a SQUID (Superconducting QUantum Interference Device). The SQUID is connected to a superconducting niobium pickup loop, deposited on the flat surface at the outer edge of one half of the quartz housing in which the gyro rotor spins. Thus, the loop, which senses the gyro’s spin axis orientation, is located on the planar surface where the two halves of the gyro housing are joined. When the gyroscope precesses or tilts, the London moment magnetic field tilts with it, passing through the superconducting loop. This causes a current to flow in the loop—a quantized current. The SQUID detects this change in magnetic field orientation. The SQUID magnetometers are so sensitive that a field change of only one quantum—equivalent to 5 x 10-14 gauss (1/10,000,000,000,000th of the Earth's magnetic field) and corresponding to a gyro tilt of 0.1 milliarcsecond (3x10-8 degrees)—is detectable.
Using the London moment to monitor the gyroscope's orientation was the perfect readout scheme for Gravity Probe B—it is extremely sensitive, extremely stable, applicable to a perfect sphere, and-most important, it exerts negligible torques (forces) on the gyroscope.
Telescope & Guide Star
GP-B technician, Ken Bower, holds
and works on pre-flight telescope
GP-B flight telescope
A 36 centimeter (14 inch) long Cassegrain reflecting astronomical telescope with a focal length of 3.8 meters (12.5 feet), mounted inside the GP-B Probe along the central axis of the spacecraft and dewar, provided the experiment’s required reference to a distant “guide star.” Any change in spin-axis orientation of each of the gyros, as they traveled through the warped and twisted spacetime around the Earth, was measured against this guide star reference to distant spacetime. During the science phase of the mission, the telescope’s job—in conjunction with the Attitude and Translation Control system (ATC)—was to keep the entire spacecraft precisely pointed at the center of the guide star with a pointing deviation in the range of approximately ±200 milliarcseconds (±6x10-5 degrees).
Ideally, the telescope should have been aligned with a distant quasar (massive bodies, located in the most distant reaches of the universe, which put out powerful radio emissions), because they appear to be fixed in their position and would thus provide an ideal, stable reference point for measuring gyroscope drift. However, quasars are too dim for any optical telescope this size to track. So, instead, the telescope was focused on a brighter, nearby “guide star.” But, like the Sun, nearby stars move relative to the other stars in our galaxy, and their light diffracts or scatters as it travels through the universe. This situation posed two difficult challenges to the experiment:
- Creating a means for the telescope to find and remain focused on the exact center of a star whose light is widely diffracted.
- Choosing a guide star whose motion could be mapped relative to quasars separately, so that the Gravity Probe B gyroscope measurements can ultimately be related to the distant universe.
Precision Pointing—Dividing the Guide Star Image
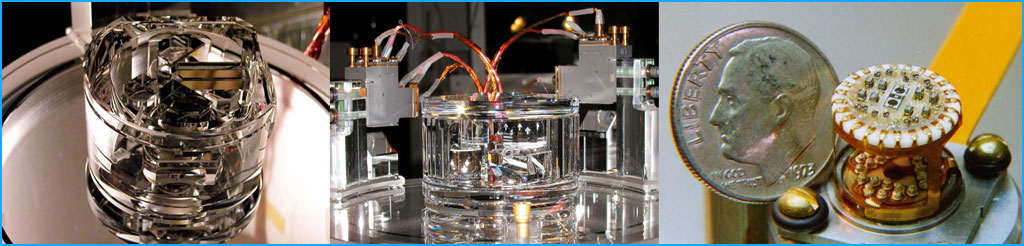
The telescope Image Divider Assembly,
a Detector Mount Assembly, and one of
the photo detectors (next to a dime)
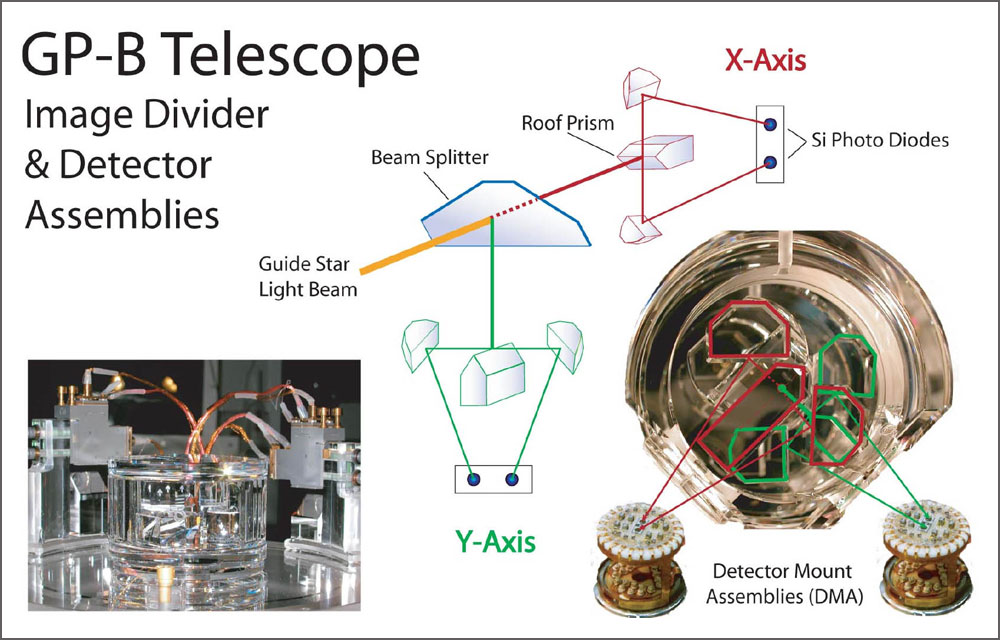
Diagram showing how the telescope
Image Divider Assembly works
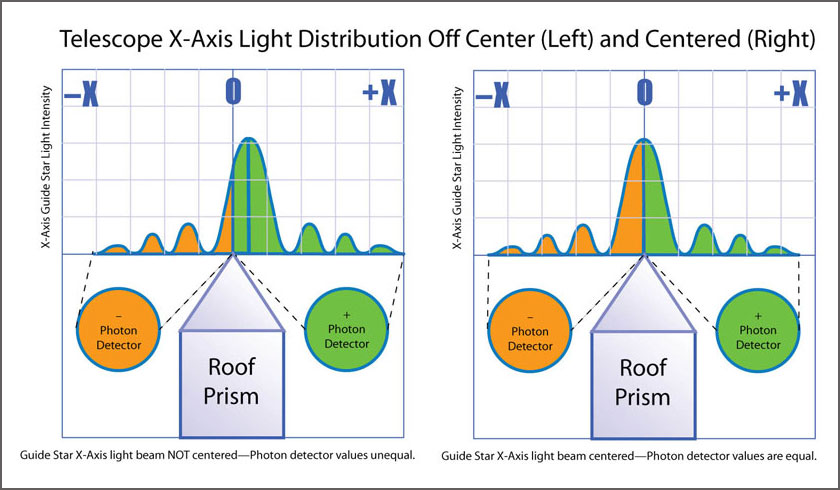
Using roof prisms and photo detectors,
the telescope centers on the guide star
To satisfy the precision pointing requirements of the GP-B experiment, it was necessary to locate the optical center of the guide star image in the telescope to an accuracy of 0.1 milliarcseconds (3x10-8 degrees). The diffraction limit size of the GP-B telescope is approximately 1.4 arcseconds, which is about 14,000 times larger than the required pointing accuracy, and this presented a formidable challenge to the GP-B team. The solution was to precisely split the image into equal x-axis and y-axis components, and then to divide each of the axis components into two half images whose brightness values could be compared.
GP-B accomplished this task by focusing the mirror-reflected starlight onto an Image Divider Assembly (IDA) at the telescope's front end. In the IDA, the starlight was first passed through a beam-splitter (a half-silvered mirror), that forms two separate images, one for the horizontal (x) axis and one for the vertical (y) axis. The half beam from each axis was then focused onto a roof-prism (a prism shaped like a peaked rooftop). Each roof prism sliced its portion of the starlight beam into two half-disks, which were focused onto a pair of silicon photo diodes.
The photo diodes converted the light signals from each half-disk to electrical signals which were then compared. If the signals were not equal, the roof-prism was not slicing the image precisely in half. The orientation of the entire spacecraft was then readjusted in real time until the signals were equal and the image was split right down the middle. When this was accomplished for both the x-axis and y-axis halves of the starlight beam, the telescope was locked on the exact center of the guide star. Once tuned up, the Attitude and Translation Control (ATC) system on-board the spacecraft was capable of locking the telescope onto the guide star in less than a minute each time the spacecraft emerged from behind the Earth over the North Pole and the guide star came into view. Once the telescope was locked onto the guide star, the telescope pointing signals were used to compensate for the small pointing deviation to an accuracy of better than 0.1 milliarcseconds (3x10-8 degrees).
Choosing a Suitable Guide Star
In order to precisely map the motion of a star relative to a quasar, it was necessary to find a star that met all of the following criteria:
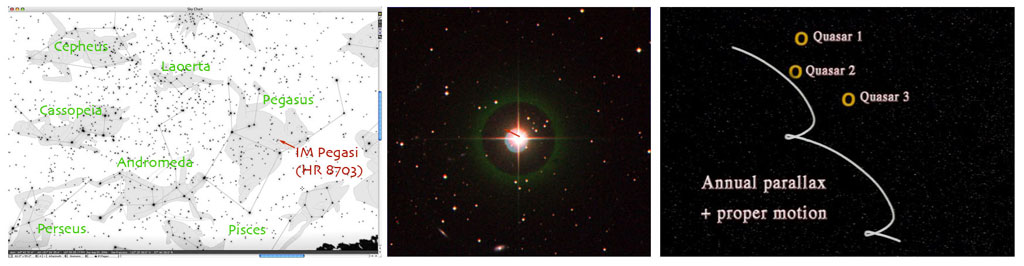
Illustration showing the location, a
photo and proper motion of the
guide star, IM Pegasi
- Correct position in the heavens for tracking by the on-board telescope (for example, the sun never gets in the way)
- Shines brightly enough for the on-board telescope to track
- Is a sufficiently strong radio source that can be tracked by radio telescopes on Earth
- Is visually located within a fraction of a degree from the reference quasar
It so happens that stars that are radio sources belong to binary star systems. Because almost half the star systems in the universe are binary, it initially seemed that there would be many good candidates for the guide star. However, out of 1,400 stars that were examined, only three matched all four of the necessary criteria. The star that was chosen as the GP-B guide star is named IM Pegasi (HR 8703).
Relating the Guide Star's Motion to a Distant Quasar
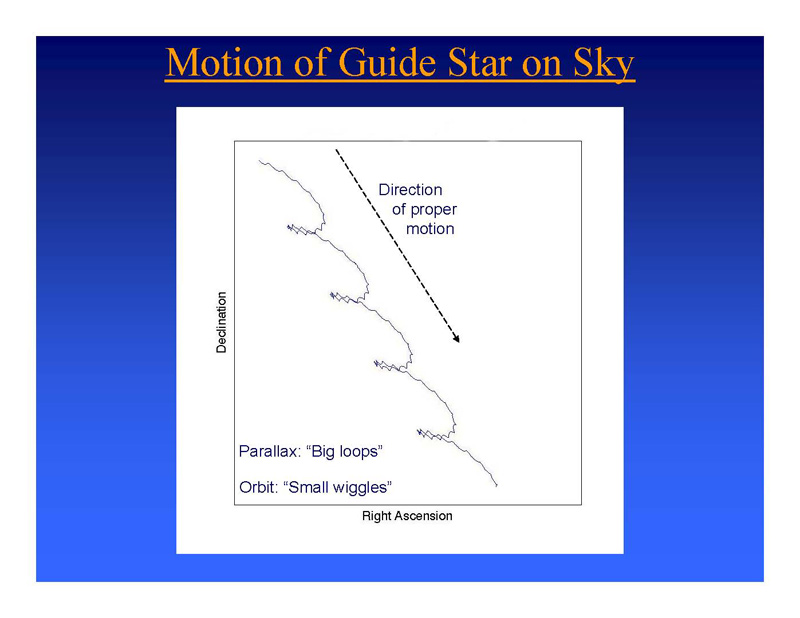
Motion of the guide star, IM Pegasi.
Like all stars in our galaxy, the position of IM Pegasi as viewed from Earth and our science telescope changes over the course of a year. In fact, IM Pegasi moves around its binary partner in a spiraling pattern, rather than a linear path. The total motion of IM Pegasi in one year alone is 100 times larger than the smallest gyroscope spin axis precession measurable with Gravity Probe B. Thus, throughout the science phase of the mission, the GP-B science telescope was tracking a moving star, but gyros were unaffected by the star's so called “proper motion;” their pointing reference was IM Pegasi's position at the beginning of the experiment. Consequently, in the gyro precession data for each orbit, it is necessary to subtract out the telescope's angle of displacement from its original guide star orientation so that the angular displacements of the gyros can be related to the telescope's initial position, rather than its current position each orbit. For this reason, a very accurate map of the proper motion of IM Pegasi is required in order to complete the GP-B data analysis.

Using VLBI to measure the motion
of IM Pegasi, and relating that
motion to distant quasars
Because IM Pegasi is a radio source, its proper motion can be tracked by a sophisticated system of radio telescopes, operating in conjunction with each other. This system is called Very Long Base Interferometry or VLBI. Using radio telescopes from New Mexico to Australia to Germany, acting as a single radio telescope the size of the Earth, a team at the Harvard-Smithsonian Center for Astrophysics (CfA) led by astrophysicist Irwin Shapiro, in collaboration with astrophysicist Norbert Bartel and others from York University in Canada and French astronomer Jean-Francois Lestrade have now mapped the motion of IM Pegasi with respect to a reference quasar over a number of years to an unprecedented level of accuracy. With these measurements the motions of the GP-B gyroscope spin axes can now be related to the reference quasar in the distant universe. However, to ensure the integrity of the GP-B experiment, we added a “blind” component to the GP-B data analysis by requesting that the CfA withhold the proper motion data that will enable us to pinpoint the orbit-by-orbit position of IM Pegasi until the rest of our GP-B data analysis is complete. Therefore, the actual precession angles of the GP-B gyros with respect to the distant universe, will not be known until the end of the data analysis process.
Dewar, Porous Plug, and Micro Thrusters

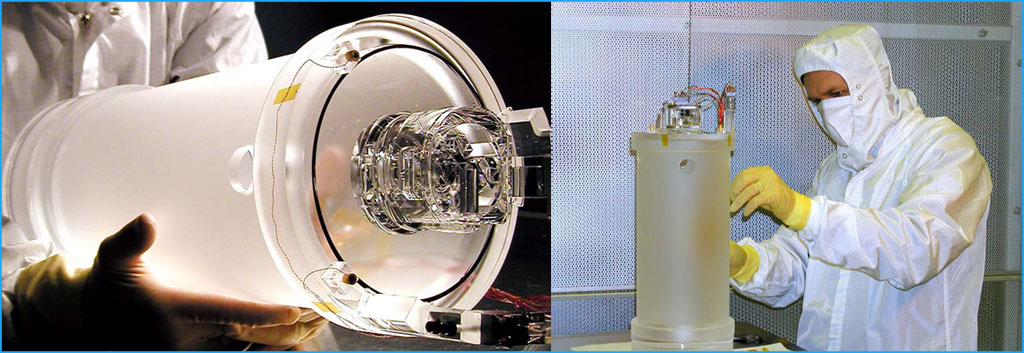
The 645-gallon GP-B flight dewar
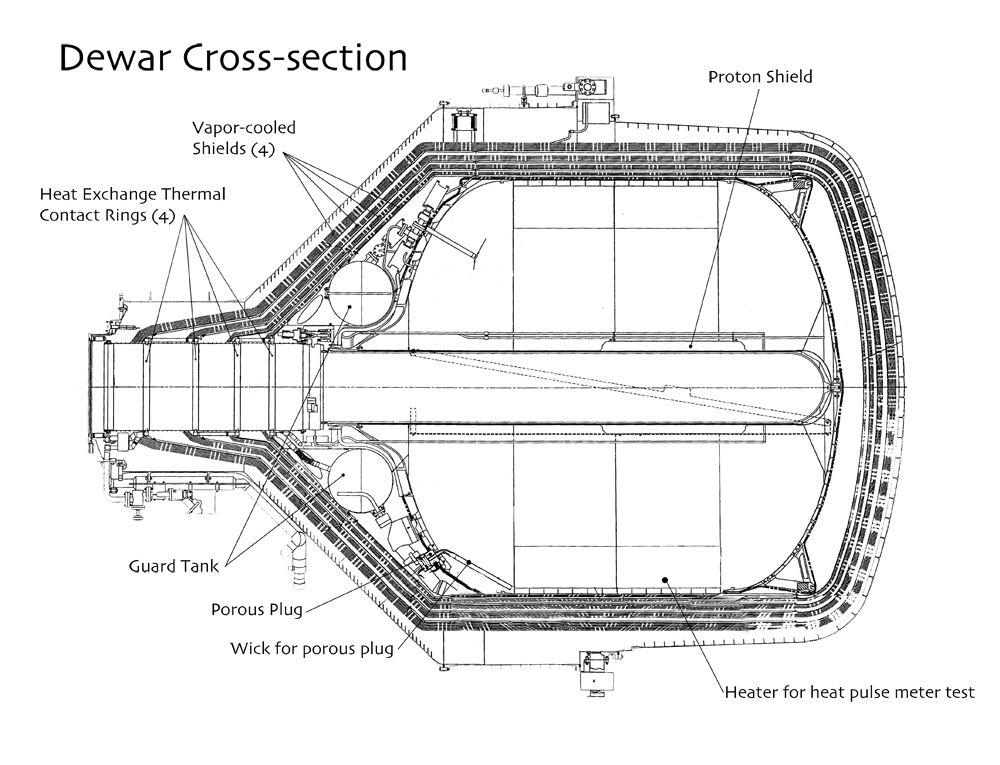
Cross section showing the contents
of the dewar
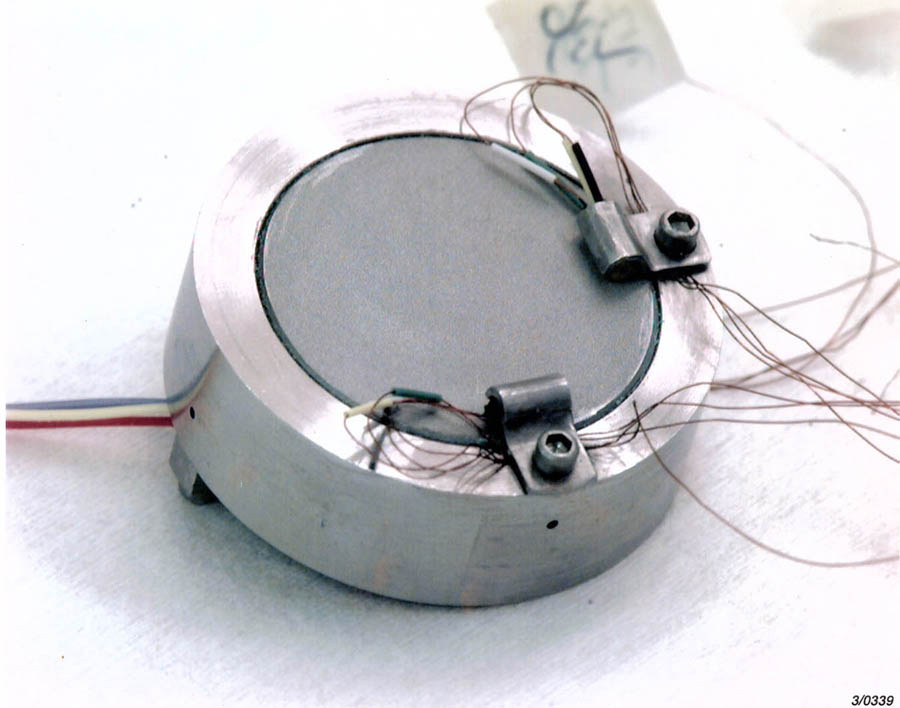
The porous plug allows boiled-off
helium gas to escape from the dewar,
leaving the liquid helium inside
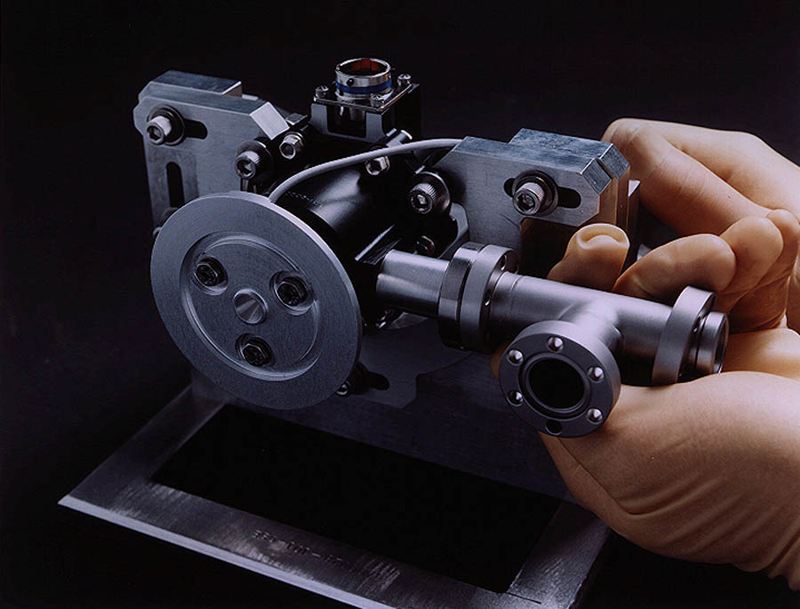
16 micro-thrusters used helium gas,
boiled off from the dewar, to control
the spacecraft's position and orientation
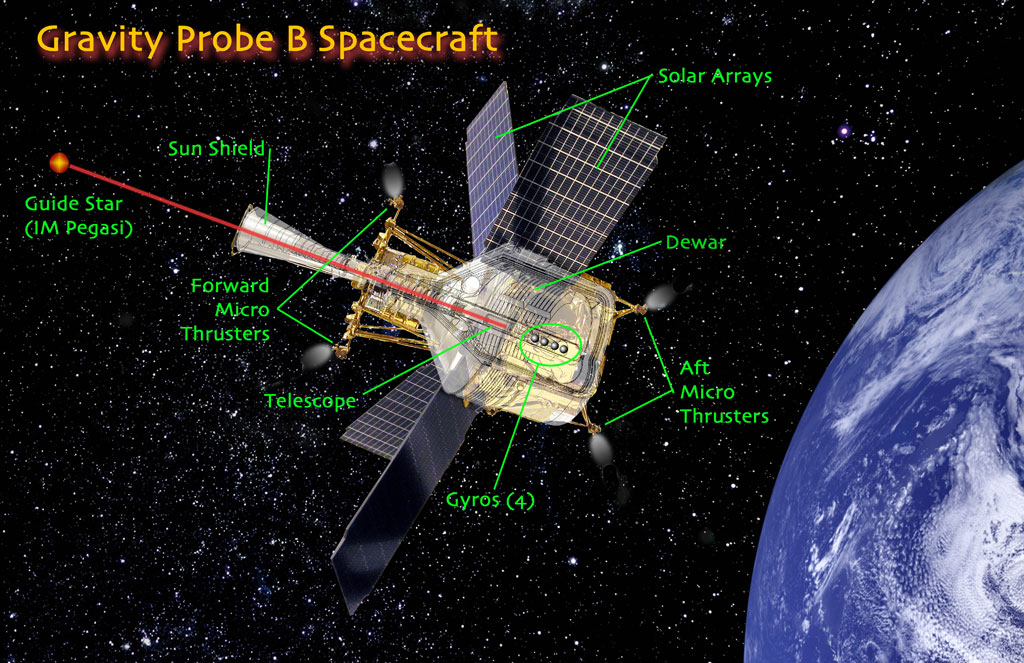
Labeled diagram of the spacecraft
showing the location of the thrusters
One of the greatest technical challenges for Gravity Probe B was keeping the probe and science instrument precisely at a designated cryogenic temperature, just above absolute zero, of approximately 2.3 kelvin (-270.9 degrees Celsius or -455.5 degrees Fahrenheit) constantly for 16 months or longer. This was accomplished by integrating the probe into a special 2,441 liter (645-gallon) dewar, or thermos, nine feet tall (about the size of a mini van), that is filled with liquid helium. When cooled to nearly absolute zero temperature, liquid helium transforms into a state called “superfluid,” in which it becomes a completely uniform thermal conductor. Only helium exhibits this, and other special properties of superfluidity. The dewar and its payload inside form the main structure around which the GP-B spacecraft was built.
The Dewar and liquid helium served two critically important functions in the mission:
- Maintaining a supercold temperature around the science instrument.
- Providing a constant stream of gas propellant for precisely controlling the position and attitude of the entire satellite.
Maintaining a Cryogenic Experimental Environment
In its 640-kilometer (400-mile) high polar orbit, the GP-B satellite is low enough to be subjected to heat radiating from the Earth's surface, and it is also subjected to alternating hot and cold cycles, as it passes from intense sunlight into the Earth's shadow every ninety-seven minutes. Throughout the life of the mission, key portions of the science instrument had to be maintained at a constant temperature to within five millionths of a degree centigrade.
During the mission, the dewar's insulating chamber remained a vacuum, which limited the amount of heat penetrating through the outside wall into the inner chamber containing the science instrument. In addition, it includes several other devices for maintaining the necessary cryogenic temperature:
- Multilayer insulation—multiple reflective surfaces in the vacuum space to cut down radiation
- Vapor-cooled shields—metal barriers, suitably spaced, cooled by the escaping helium gas
- Slosh baffles—metal ridges that help suppress tidal motions in the superfluid helium
- Porous Plug—invented at Stanford, and engineered for space at NASA Marshall Space Flight Center in Huntsville, AL, Ball Aerospace in Boulder, CO, and the Jet Propulsion Laboratory in Pasadena, CA. This plug allows helium gas to evaporate from the Dewar's inner chamber, while retaining the superfluid liquid helium inside.
Using Dewar Helium Boil-off as Thruster Propellant
When there was still helium in the dewar, virtually no heat could penetrate from the outside wall through the vacuum and multilayer insulation inside. However, a small amount of heat (about as much as is generated by the message indicator lamp on a cell phone) did leak into the Dewar from two sources:
- Conduction of heat flowing from the top of the Dewar into the liquid helium
- Radiation leaking down through the telescope bore into the liquid helium.
The porous plug controls the flow of this evaporating helium gas, allowing it to escape from the Dewar, but retaining the superfluid helium inside. The plug is made of a ground-up material resembling pumice. The evaporating helium gas climbed the sides of the inner tank near the plug and collected on its surface, where it evaporated through the pores in the plug, much like sweating in the human body.
The evaporating helium provided its own kind of refrigeration. As the helium gas evaporated at the surface of the porous plug, it drew heat out of the liquid helium remaining in the Dewar, thereby balancing the heat flow into the Dewar. You can feel this effect on your skin when you swab your skin with water. As the liquid evaporates off your skin, it draws heat energy with it, leaving your skin a tiny bit cooler than before.
The helium gas that escaped through the porous plug was cycled past the shields in the outer layers of the Dewar, cooling them (thus the name, “vapor-cooled shields”), and then it was used as a propellant for eight pairs of micro thrusters that are strategically located at the top and bottom of the spacecraft. Based on data from the on-board telescope and the gyroscope that was used as a proof mass for maintaining a drag-free orbit, the flow of the escaping helium gas was carefully metered through these thrusters in order to precisely control the spacecraft's position. In fact, the position of the entire spacecraft was balanced around the proof mass gyroscope by increasing or decreasing the flow of helium through opposing thrusters, creating a drag-free orbit.
Spacecraft & Payload (Next) ->