STATUS UPDATE AS OF 31 MARCH 2006:
GRAVITY PROBE B MISSION STATUS AT A GLANCE
| Item | Current Status |
| Mission Elapsed Time | 710 days (101.4 weeks/23.3 months) |
IOC Phase |
129 days (4.2 months) |
Science Phase |
352 days (11.6 months) |
Final Calibration Phase |
43 days (1.3 months) |
Extended Science Phase |
4 days |
Post Mission Phase |
182 days (26.0 weeks/6.0 months) |
| Current Orbit # | 10,475 as of 1:00 PM PST |
| Spacecraft General Health | Good |
| Roll Rate | 0.04 rpm (25 minutes per revolution) |
| Gyro Suspension System (GSS) | All four gyros digitally suspended |
| Gyro Spin Rates | ~0.52 rpm (nominal spacecraft roll rate before roll down) |
| Dewar Temperature | ~231.7 kelvin (and rising ~0.5 kelvin/day) |
| Global Positioning System (GPS) lock | Nominal |
| Attitude Control System (ATC) | Nominal for post-mission operation |
| Telescope Readout (TRE) | Pointing performance too low to lock onto guide star |
| Command & Data Handling (CDH) | B-side (backup) computer in control Multi-bit errors (MBE): 6 in CCCA Backup computer during one event; 0 in GSS computer; 0 in SRE computer |
MISSION DIRECTOR'S SUMMARY
On Mission Day 710, both the GP-B space vehicle and payload continue to be in good health. All active subsystems, including solar arrays/electrical power, Experiment Control Unit (ECU), flight computer, star trackers, magnetic sensing system (MSS) and magnetic torque rods, gyro suspension system (GSS), and telescope detectors, are performing nominally. We continue to communicate with the spacecraft regularly, monitoring the Dewar and probe as they continue to warm up, and collecting status data from various instruments on-board.
The temperature inside the Dewar has now warmed to ~231.7 kelvin, and its rate of temperature rise has slowed a bit to ~0.5 kelvin per day. The temperature inside the Dewar will eventually reach thermal equilibrium with the temperature of the Dewar's outer shell, which has been averaging approximately 240 kelvin (-33 degrees centigrade), but this will occur very gradually.
Last Saturday, 25 March 2006, six Multi-bit Errors (MBEs) occurred in short succession in the spacecraft's backup flight computer (CCCA), which has been controlling the spacecraft for the past year. Three of these errors were self-clearing, and our mission operations team--now very experienced in handling MBEs--created and uploaded patches to correct the contents of the other three memory locations that were affected. There was no loss of spacecraft pointing accuracy and no effect on the four science gyros, which remained digitally suspended. As currently programmed, these errors did trigger a safemode response that stopped the computer's timeline, (pre-programmed sequence of commands and actions). Then, after uploading patches to the affected memory locations, our mission operations team sent commands to restart the timeline.


We recall that throughout last March (2005), the spacecraft sustained numerous MBEs, some of which caused the automatic switch-over from the main flight computer to the backup computer that we have been using ever since. And while we have no formal analysis to verify this conjecture, we suspect that there may be some type of seasonal alignment of the spacecraft with respect to the Sun occurring in March and increasing the probability of the on-board computers sustaining MBEs.
Prior to launch, we had anticipated the possibility of the spacecraft experiencing multi-bit computer memory errors on orbit, and we had taken a very conservative approach and programmed the corresponding safemode responses to automatically re-boot the computers whenever two or more MBEs occurred within 0.2 seconds. As a result of our experiences with MBEs last year, we have since revised these safemode responses to be less sensitive, and rather than re-booting the computer each time a spate of MBEs occurs, we simply halt the timeline, correct the affected memory locations, and then return to normal operations.
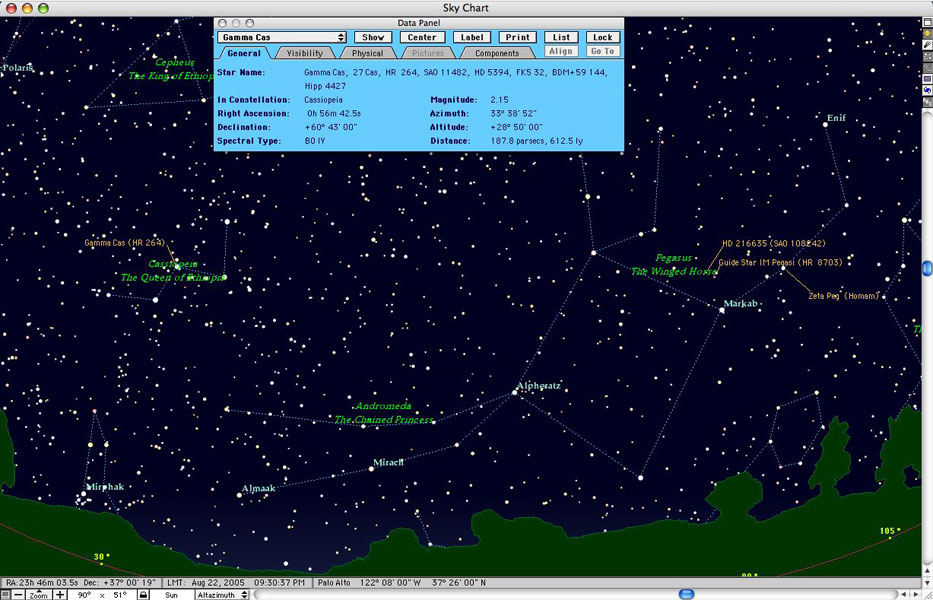
Our telescope team is continuing to collect test data to determine the feasibility of using the two star trackers on-board the spacecraft to observe brightness variations in selected star systems and thereby possibly detect the presence of orbiting planets in those systems. Our team has been studying the area of the sky in the vicinity of the star Gamma Cas (HR 264), which is visited by our star tracker B while the vehicle is pointed at our guide star, IM Pegasi. In the process of collecting data in this region, we have begun to record interesting brightness data on the star Algol, in constellation Perseus. We will report on the progress of this investigation in next month's update.
For the time being, these star tracker studies are the only investigation currently being performed with the GP-B spacecraft, as the main focus of our science team continues to be the analysis of the relativity data we collected in 2004-2005. The data analysis is proceeding as described in last month's update.
GP-B MISSION NEWS—FROM EINSTEIN TO FARMING
"In some way or other, each one of us affects the course of history. Because of the extraordinarily serendipitous way change happens, something you do during the course of today may eventually change the world." —James Burke
In his book and highly-acclaimed television documentary series, "Connections," the eminent British science historian, James Burke, provides numerous examples in the history of science and technology of chains of connections between seemingly disparate events or inventions that demonstrate how one thing often unexpectedly leads to another. Here at GP-B, we have a wonderful example of such a chain of connections that has led from the precise tracking of the GP-B satellite's position to automatically landing aircraft, and from there to automated precision farming with tractors.
The story begins in 1984 when NASA funded GP-B as a flight program. In that same year Brad Parkinson joined the Stanford faculty as professor of Aeronautics & Astronautics, and he became co-principal investigator and program manager of GP-B. Parkinson is one of the fathers of Global Positioning Systems (GPS) technology and its applications, and in addition to managing engineering development for GP-B, Parkinson established and ran the Stanford GPS research lab. Both the GP-B and GPS research labs were administered by the W.W. Hansen Experimental Physics Lab (HEPL), an independent laboratory at Stanford, supporting interdisciplinary research programs in fundamental science and engineering.
Over the ensuing 20 years, HEPL forged a unique collaborative and synergistic research environment among various Stanford departments, including Physics, Engineering, and Aeronautics & Astronautics. For students interested in these fields of research, the opportunities were extraordinary--a chance to work in NASA and other government-funded research programs with Everitt, Parkinson and other top scientists, in a world-class university, coupled with Stanford's close proximity and ties to Silicon Valley companies--it simply didn't get any better than this.
And so, like a strong magnet, the HEPL/GP-B/GPS labs began attracting some of the best and brightest graduate students from Stanford and other universities around the country. One such doctoral student was Clark Cohen, who came to Stanford to study with Parkinson and joined the GP-B team as a doctoral student after getting an MS degree in 1989. Cohen's initial work at GP-B focused on producing an innovative way of using trapped magnetic flux to measure changes in the spin axes of the GP-B gyroscopes. However, Cohen soon turned his attention to solving the elusive problem of using GPS technology to precisely control the attitude of the GP-B spacecraft. At that time, the best GPS receivers, called differential GPS, could provide positioning accuracy to about a meter, but controlling the attitude of the GP-B spacecraft needed to be 100 times more accurate--down to a tenth of a degree which equates to about a centimeter.
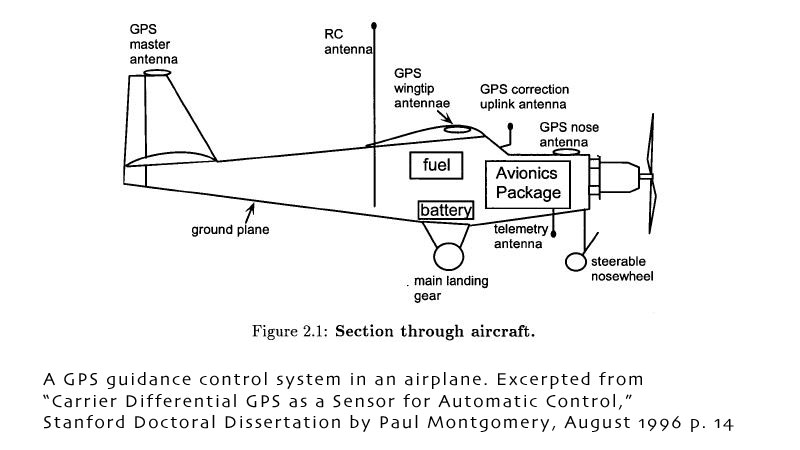

Cohen thus set his sights on perfecting a high-precision form of GPS called Carrier-Phase Differential GPS (CPDGPS) that could provide continuous real-time Position, Velocity, Time, and Attitude (PVTA) sensor information for all axes of a vehicle. At that time, there had been many attempts to accomplish this goal, but no one had yet succeeded. In thinking about this problem, Cohen realized that controlling the attitude of a spacecraft was essentially no different from controlling the attitude of an airplane. Furthermore, not only could he more readily test this precision technology on airplanes, but also if this technology proved successful, the airlines and the FAA were a ready commercial market.

In the research and development for his doctoral dissertation, entitled "Attitude Determination Using GPS," Cohen determined that he could address cycle ambiguities and achieve extremely precise positioning from GPS signals by placing a pair of fixed transmitters, called "integrity beacons," on the runway. His fellow graduate student, Stu Cobb, developed these GPS beacons ("GPS on a calling card"). Another student, Dave Lawrence, developed the mathematical techniques to solve the cycle ambiguity problem. Cohen, working with a small cadre of fellow students, used a single-engine Piper Dakota airplane, loaned to the project by Stanford Aero-Astro professor J. David Powell, to test and refine his high-precision GPS solution. After receiving his doctorate in 1992, Cohen remained at Stanford for two more years as a post-doctoral student, focusing his research on developing a GPS system that could precisely and automatically land commercial airplanes in any kind of weather.

During this period and for several years thereafter, a number of other graduate students came to the various HEPL labs to work with Parkinson, Powell, and other professors there. In a dramatic tour-de-force technology demonstration, Cohen led a group of these graduate students in automatically landing a commercial Boeing 737 airplane over 100 times. Buoyed by this success, Parkinson was already thinking about another, more down-to-earth application of GPS precision vehicle control technology--farming and construction equipment.
Farmers have known for decades that some farm practices produce better results than others, but many of these advanced practices require very accurate placement of seed, fertilizers and irrigation lines. For example, seeding in the exact center of a cultivated row and spraying in a focused band can dramatically increase crop yields, reduce chemical usage and control costs. Also, farmers operate in difficult conditions such as rain, fog, dust and darkness. With traditional human-steered tractors, it is nearly impossible for even an experienced driver to reliably repeat straight crop rows. Normally, a tractor will wobble from 10 to 30 cm as it encounters small obstacles or experiences operator error-not to mention drivers nodding off from the monotony of driving through furrow after furrow.
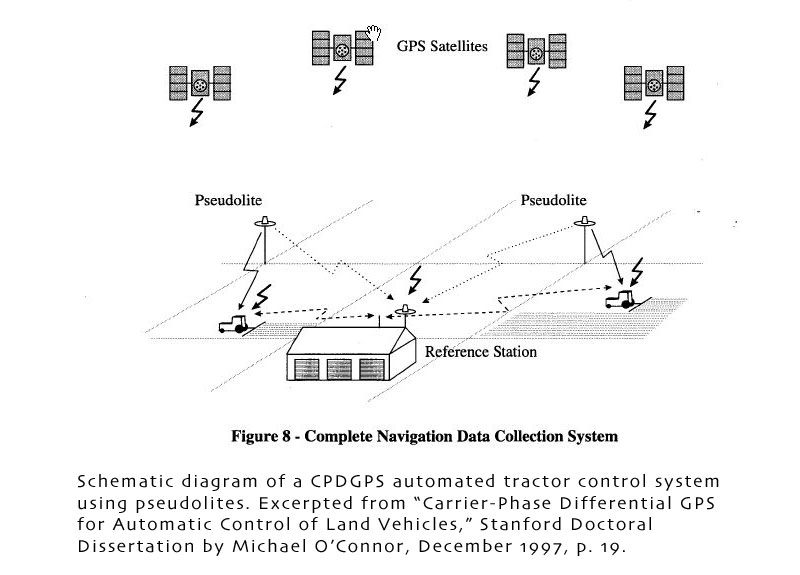
While Cohen was busy landing airplanes, graduate student Mike O'Connor took the first step towards automating the control of land vehicles by using a GPS receiver and a yacht steering mechanism to drive an electric golf cart in a straight line without anyone aboard. The success of this experiment enabled Parkinson, O'Connor, and other members of the GPS lab to approach the John Deere tractor company to fund research in adapting GPS position control technology for agricultural uses. The solution that O'Connor and other members of the GPS student team came up with was a variation of the GPS airplane landing system. Antennas were placed on top of the tractor cab, and they received GPS signals from a reference station, called a pseudolite (a ground-based pseudo-satellite transmitter similar to the Integrity Beacon), located in the field. The GPS signals provided centimeter-level accuracy on the tractor's exact position and attitude, and this information, along with sensor information from the tractors front wheel angle, was fed into a computer in the tractor's cab. The computer, which had been loaded with a driving map of the field controlled the tractor's steering, while a human driver still controlled the throttle and brakes.

The GPS Lab was on a roll. This automated vehicle control system, developed in Stanford's GPS lab, resulted in U.S. Patent #6,052,647, "Method and System for Automatic Control of Vehicles Based on Carrier Phase Differential GPS," being granted on April 18, 2000 to Brad Parkinson and three of his graduate students--Mike O'Connor, Gabirel Elkaim, and Thomas Bell.
Meanwhile, in 1994, Cohen left Stanford, armed with a Small Business Technology Transfer (STTR) grant to found a company called IntegriNautics Corporation, whose purpose was to commercialize the development and production of precision GPS-based vehicle control systems for various civilian and military applications. As O'Connor, and some of the other students from the GP-B/GPS/STEP labs, completed their doctoral work at Stanford, they were welcomed into IntegriNautics, where they continued to work on their R&D projects in a commercial setting. In 1996, IntegriNautics spawned a subsidiary named AutoFarm to focus specifically on agricultural applications of GPS auto-steering technology, and the tractor steering technology was trademarked with the name, RTK (Real-Time Kinematic) AutoSteer. In 2004, IntegriNautics changed its name to Novariant Corporation.



On April 6, 2006, the Novariant AutoFarm RTK AutoSteer technology, along with four principal members of Novariant, will be inducted into the Space Technology Hall of Fame in an awards ceremony at the 22nd National Space Symposium in Colorado Springs, CO. The four individual Novariant inductees are: Thomas Bell, Clark Cohen, David Lawrence, and Michael O'Connor. In addition, several other former Stanford students who worked in the HEPL GP-B/GPS/STEP labs and then joined Novariant after getting their doctorates, will also receive commendation awards. These people include: Stuart Cobb (GPS), Gregg Gutt (GP-B), Michael Eglinton (GP-B), Paul Montgomery (GPS), and Glen Sapilewski (STEP).
Furthermore, at the ceremonies, both Novariant Corporation and the Gravity Probe B program will be recognized for their roles as the innovating organizations under which this technology was developed, and former Program Manager, Gaylord Green, will accept this award on behalf of GP-B. Finally, NASA's Marshall Space Fight Center, under which GP-B is administered, and the HEPL Labs will receive organizational commendation awards for their roles in supporting the successful development and commercialization of this technology--recognizing these institutions as outstanding examples of applying space technology for the betterment of life on Earth. Brad Parkinson will accept this award on behalf of Robert Byer, Director of HEPL, and it is fitting that Parkinson, himself, will also receive an individual commendation award for his role in the development of this technology.
NEXT SCHEDULED GP-B STATUS UPDATE & MISSION NEWS ON 30 APRIL
Our next regularly scheduled update will be at the end of April. Of course, we will post a timely update if there are any important changes in the spacecraft's status, or if noteworthy events occur here at GP-B in the meantime.
UPDATED NASA/GP-B FACT SHEET AVAILABLE FOR DOWNLOADING
We recently updated our NASA Factsheet on the GP-B mission and experiment. You'll now find this 6-page document (Adobe Acrobat PDF format) listed as the last navigation link under "What is GP-B" in the upper left corner of this Web page. You can also click here to download a copy.
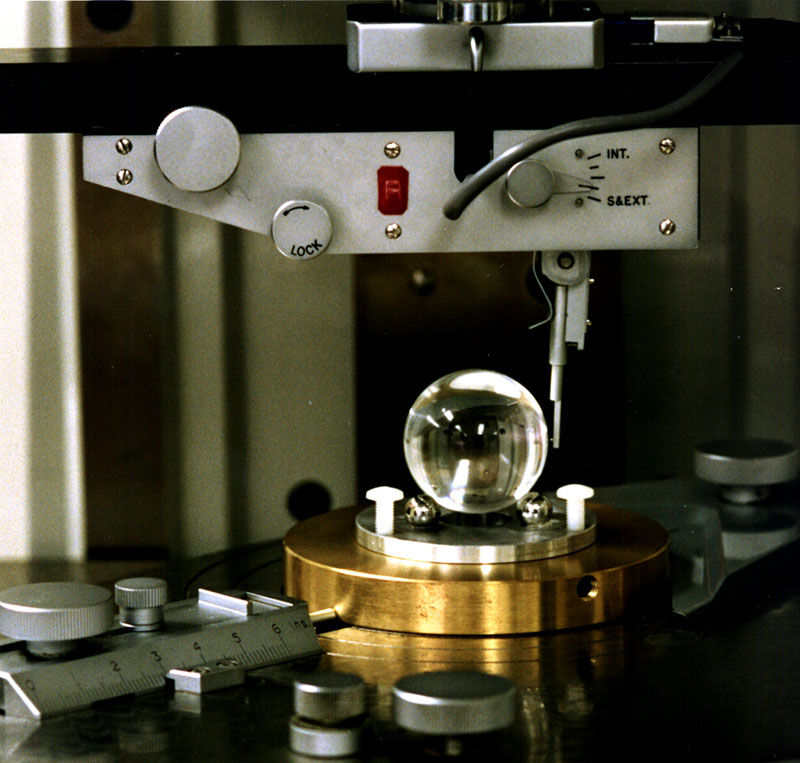
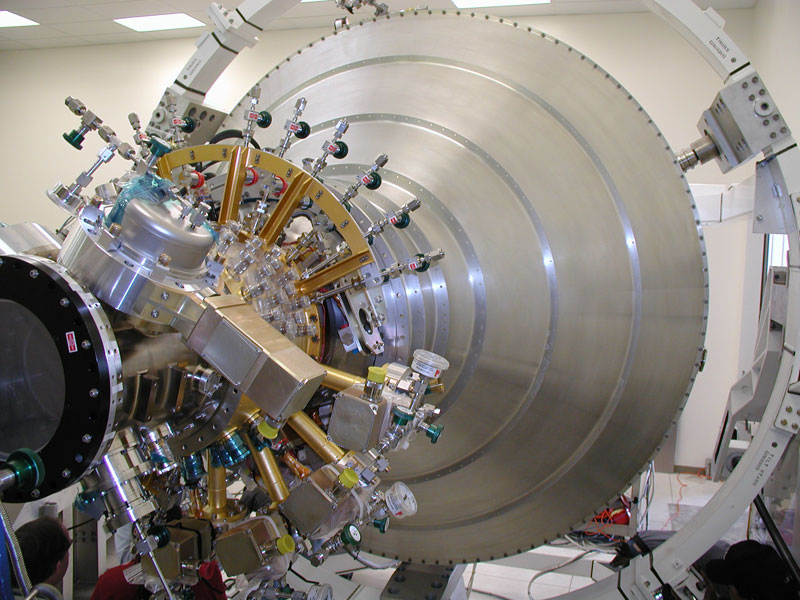
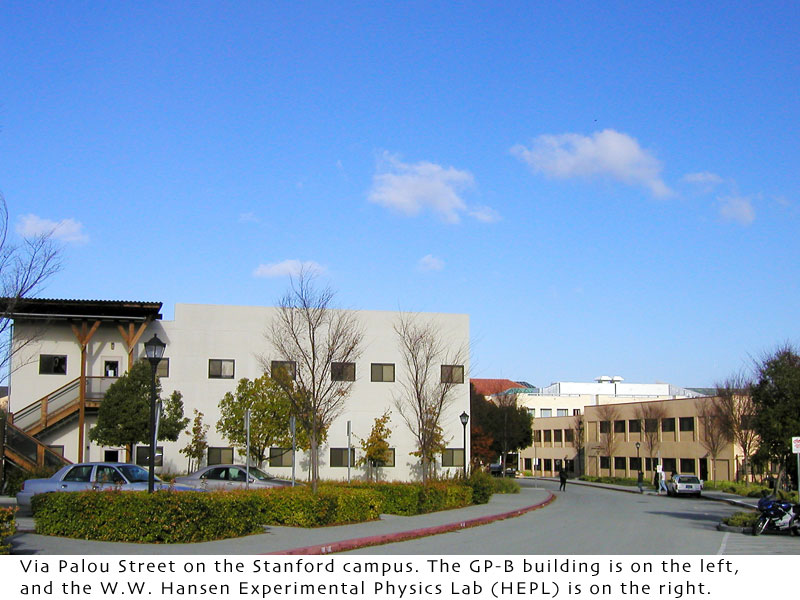
Photos & Drawings: The photos of the roundness measurement of a gyro rotor, top view of the Dewar, error screen, GP-B Mission Operations Center, star tracker, GP-B/HEPL Labs on Via Palou Street, and GPS-controlled tractor at Stanford, as well as the spacecraft GPS antenna placement diagram, all came from the GP-B Image archive here at Stanford. The sky chart image, showing the guide star IM Pegasi and Gamma Cas, were generated by the Voyager III Sky Simulator from Carina Software. The various diagrams of GPS control systems were extracted from Stanford doctoral dissertations, as indicated in their respective captions. The photos of Novariant AutoFarm AutoSteer™ technology, plus the photo of a Boeing 737 landing, were provided courtesy of Novariant Corporation. Click on the thumbnails to view these images at full size.
MORE LINKS ON RECENT TOPICS
- Track the satellite in the sky
- Photo, video & and news links
- Build a paper model of the GP-B Spacecraft
- Following the mission online
- Our mailing list—receive the weekly highlights via email
- The GP-B Launch Companion in Adobe Acrobat PDF format. Please note: this file is 1.6 MB, so it may take awhile to download if you have a slow Internet connection.
Previous Update
Index of Updates